The factors on these screens control how speeds and distances are determined.
|
|
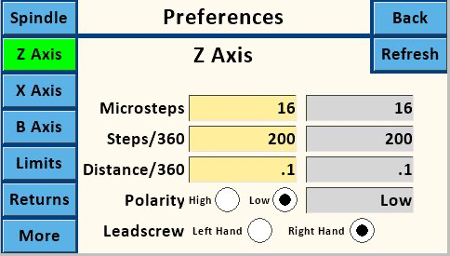
Microsteps
|
This must use valid values for the stepper driver, and is usually 1, 2, 4, 16, 32, 64, or 128. These settings must match the jumper settings on the PCB.
32 is the designed value for the MDF Rose Engine Lathe 2.0.
|
|
|
|
Steps/360
|
This must use valid values for the stepper motor. The typical step angle is 1.8 deg, so this would be
\[
\frac{360 \, \mathrm{deg}}{1.8 \, \mathrm{deg}} = 200
\]
200 is the designed value for the MDF Rose Engine Lathe 2.0.
|
|
|
|
Distance/360
|
This is the distance the carriage moves in one revolution of its stepper motor. It is a value arrived at empirically by measuring the movement along the selected axis using a dial indicator or other appropriate device while the stepper motor revolves a set number of turns.
This can be accomplished by entering a value in Distance/360 such as 1, then using the Move Screen to move a Distance of 20 while measuring. This should turn the motor through 20 full revolutions. Divide the distance traveled by 20 and enter calculated value into Distance/360. If the total distance moved in 20 revolutions is insignificant, use a larger Distance number like 50 (or even 100).
Note that best practice is to remove backlash from the axis' mechanism prior to the measurement run by moving the axis in the same direction. It may be possible to get a starting point for Distance/360 by calculation calculating the stepper pulley to driven pulley ratio, and/or the thread pitch.
Finally, it is important to note that if you use different pieces of apparatus (such as a cross-slide, a spherical or a curvilinear apparatus) with the Z Axis, each will likely have a different value for Distance/360, so keep track of these separately for each piece of apparatus.
|
|
|
Polarity
|
The Polarity High and Low radio buttons for both Spindle and Z Axis are set as:
|
High
|

|
High setting is for use for some external stepper drivers
|
|
Low
|

|
Low is the default, which is the correct setting when using the StepperOnline DM542T and the Pololu DRV8825 Stepper Drivers.
|
|
|
Leadscrew
|
Leadscrew should be set to the thread direction of the axis leadscrew.
|
Left Hand
|
|
Use when using an apparatus with a left-handed threaded rod. A Hardinge compound slide-rest has a left-hand thread.
|
|
Right Hand
|
|
Use when using an apparatus with a right-handed threaded rod
|
|